This overview for Project Wyvern is a basic explanation of the main components, controls, and applications of an inexpensive quadrotor aircraft.
BackgroundThe majority of quadrotors are very expensive. The possibility of creating a budget quadrotor robot opens the door to new and interesting experiments such as group communication and flocking patterns. Within the scope of this course, building a quadrotor robot offers an interesting application of wireless communication, high frequency sensor and ADC measurements, and a combination of mechanical design, electrical design, and controls theory.
Microcontrollers
MaEvArMThe MaEvArM is a general purpose microcontroller platform using the ATmega32U4. The primary purpose of the MaEvArM on the robot platform is dedicated motor control to the four (4) ESC brushless motor controllers.
FireFly Zigbee wireless communication, allowing for wireless control of direction, altitude, and localization information as well as feedback from on-board sensors.
ATMega168 Dedicated ADC microcontroller to output a constant stream of accelerometer, gyroscope, magnetometer values via SPI to the MaEvArM and FireFly.
Motors
Brushless Motors Brushless DC motors are more efficient and longer lasting than brushed motors, offering lower cost in the long run and a greater thrust to power ratio. A downside to using this type of motor is that it requires a particular form of dedicated motor controller and is frequently more expensive than a brushed motor. Brushless motors have a significantly longer life-span and better performance per weight than one finds in most brushed motors. The proposed quad-rotor will utilise the Suppo A2208/14 motor which for the approximated weight will draw around 3.4 [amperes] at 7 [volts] for stable flight with an overall lifting capability of 700 [grams] and will be capable of an overall lifting capability of 1.2 [kilograms]. Moreover, the motor has a rise of 1450 [Kv]. The aforementioned properties should be sufficient for stability and most maneuvering. Variation of rotors will allow for differing lifting capabilities at greater ampere consumptions.
Brushless Motor Controllers Brushless ESCs are used to allow a convenient PWM output from the MaEvArM to control the motors while producing the necessary sinusoids to drive the brushless motors at the necessary current. Using back-EMF the motor controller is able to determine the current phase of the motor and apply the correct voltage in sequence and cause the motor to rotate.
Sensors
Accelerometer To sense changes in movement. Three degrees of freedom.
Gyroscope To sense changes in direction and absolute position. Three degrees of freedom
Magnetometer Absolute xyz orientation over time, correcting steady state fluctuations in Gyroscope (a novelty included in the sensor PCBA)
Barometer To allow for autonomous flight or flight stabilization, a vertical height (altimeter) is required. Through the use of atmospheric pressure, a barometer is able to output voltage changes which can be converted into altitude within a 9 cm cylinder of air resolution.
GPS (possible add-on) In addition to the barometer, GPS is another useful sensor for autonomous flight. In addition to position globally within approximately 2-3 meters, the global positioning system adds a second measurement for vertical position. Combining the measured vertical positions from the GPS and the barometer could lead to a more accurate measurement.
CCTV (possible add-on) To transmit video wirelessly, two options are available. Serial video cameras use RS232 connections directly to the microcontroller with wireless capability (in our project, the FireFly). This video or image information can be directly used on a computer for use in image processing/autonomous modes. A downside to using this type of camera is that lower quality video/images are transmitted due to different processes (control, sensor information, etc) using the same transceiver. A more efficient and less expensive option would be to use a separate video/transmitter combo that uses the 2.4GHz frequency. The receiver, connected to a TV, would show the view from the aircraft in real-time. This option, however, is more difficult to use in image processing and autonomous control.
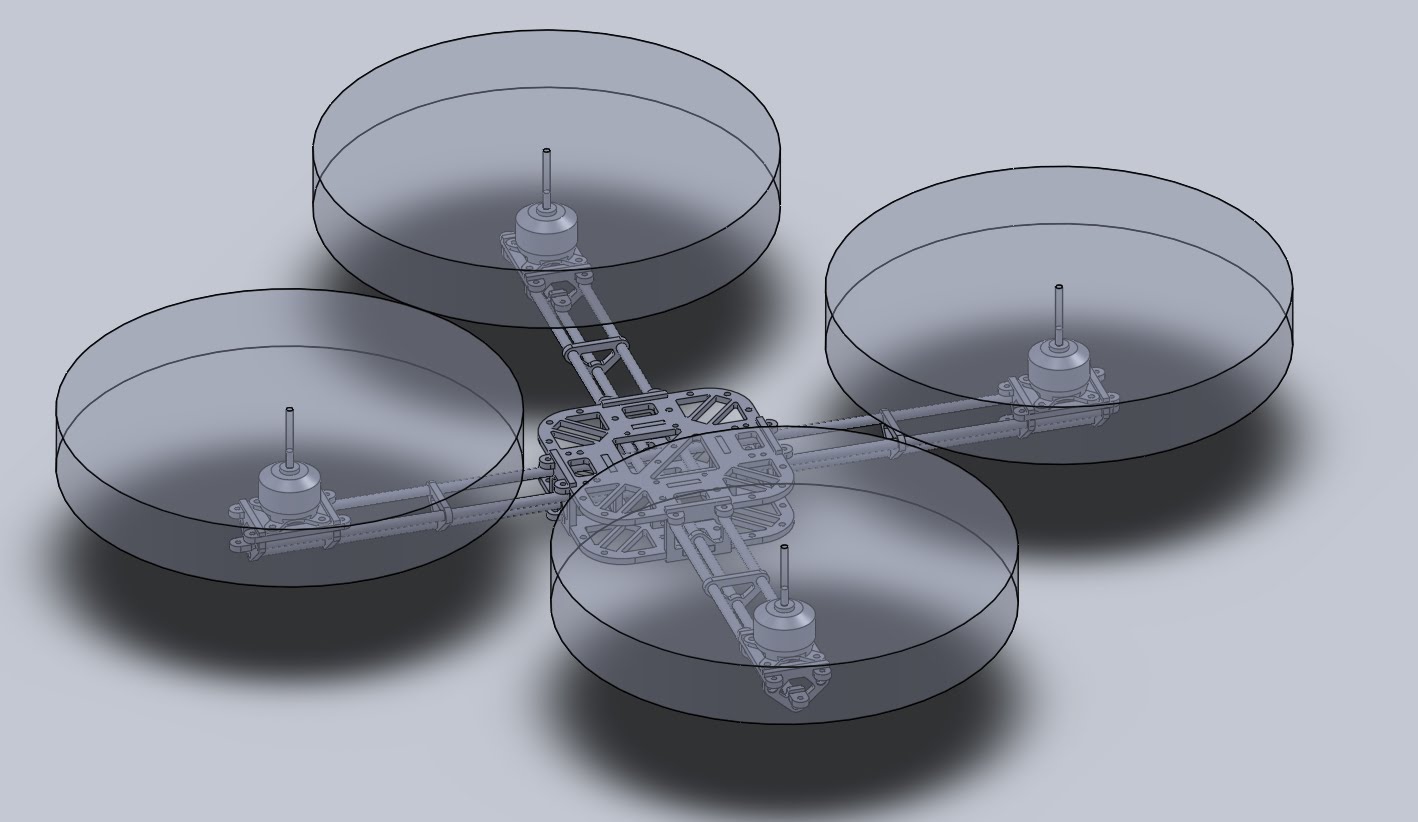
Airframe
Approximate Total Weight 600g
Material Carbon Fiber (if feasible), otherwise acrylic/abs for manufacturability.
Flight Control
PID PID, or proportional-integral-derivative controllers are loop feedback controls that aim to minimize over-compensation to data, which one might anticipate as being rather noisy. They use different feedback methods to limit the difference, or error, between the output and the desired goal.
Kalman Filter A Kalman Filter is used to obtain more precise values over time from data that contains noise.
Roll (Left/Right Control) Roll control, which is rotation about the X-axis (the axis between Front and Back rotors), is accomplished by increasing/decreasing the Left and Right rotors. A left roll is achieved by increasing the Right rotor while simultaneously decreasing the Left rotor. The opposite, increasing the Left rotor while simultaneously decreasing the Right rotor, results in a right roll.
Yaw (Turning Control) Yaw control, which is rotation about the Z-axis (the vertical axis), is accomplished by increasing/decreasing the Left/Right and Forward/Back rotor pairs. A left yaw (or left rotation of the aircraft) is achieved by increasing the Left/Right rotor pair while simultaneously decreasing the Front/Back rotor pair. The opposite, increasing the Front/Back rotor pair while simultaneously decreasing the Left/Right rotor pair, results in a right yaw (or right rotation of the aircraft).
Pitch (Foward/Backward Control) Pitch control, which is rotation about the Y-axis (the axis between Left and Right rotors), is accomplished by increasing/decreasing the Front and Back rotors. A forward pitch is achieved by increasing the Back rotor while simultaneously decreasing the Front rotor. The opposite, increasing the Front rotor while simultaneously decreasing the Back rotor, results in backward pitch.
Hovering Stable, minimal oscillation flying at constant altitude--the first great milestone
Takeoff/Landing Second great milestone--stable liftoff and landing, controlling aircraft in the face of air disturbances
Timeline March 15 - Gather materials and parts
March 22 - Airframe construction complete
March 29 - Program Sensor MCU
April 5 - ESC PWM and birth flight, open loop
April 12 - Sensor serial communication to MaEvArM
April 19 - Initial PID design started
April 28 - Control tweaking and testing, etc.
Extensions (Senior Design)
Wireless communication between multiple flying robots, flocking patterns, etc.
Conclusion The proposed project is very ambitious, and care must be taken to divide it into parts that can be more easily managed. This will more than likely become a senior design project and, if it is done right, will allow for a multitude of very interesting applications and modifications.





































{kind=link}